Nepean Private Hospital is leading the way in innovative
robotic-assisted surgical technology
Dr Simon Coffey, Orthopaedic Surgeon was the first in Australia to perform robotic-assisted total knee replacement surgery using the Apollo™ system.
This was proudly performed at Nepean Private Hospital.
The Apollo robotic system utilises advanced imageless computer navigation with two handheld robots to assist the surgeon in implementing a personalised knee replacement.
Apollo™ is built on a platform of clinical success in knee replacement, where patients reported an overall satisfaction rate above 97%1

Dr Simon Coffey
Orthopaedic Surgeon
58A Derby Street
Penrith NSW 2750
T 02 4732 2566
F 02 4732 3155
Dr Simon Coffey, orthopaedic department head (2002 to 2024) at Nepean Private Hospital, specialises in the management of lower limb musculoskeletal problems, specifically in primary and revision hip and knee replacement as well as sports and trauma. He is the first in Australia to perform surgery using the Apollo™ system.
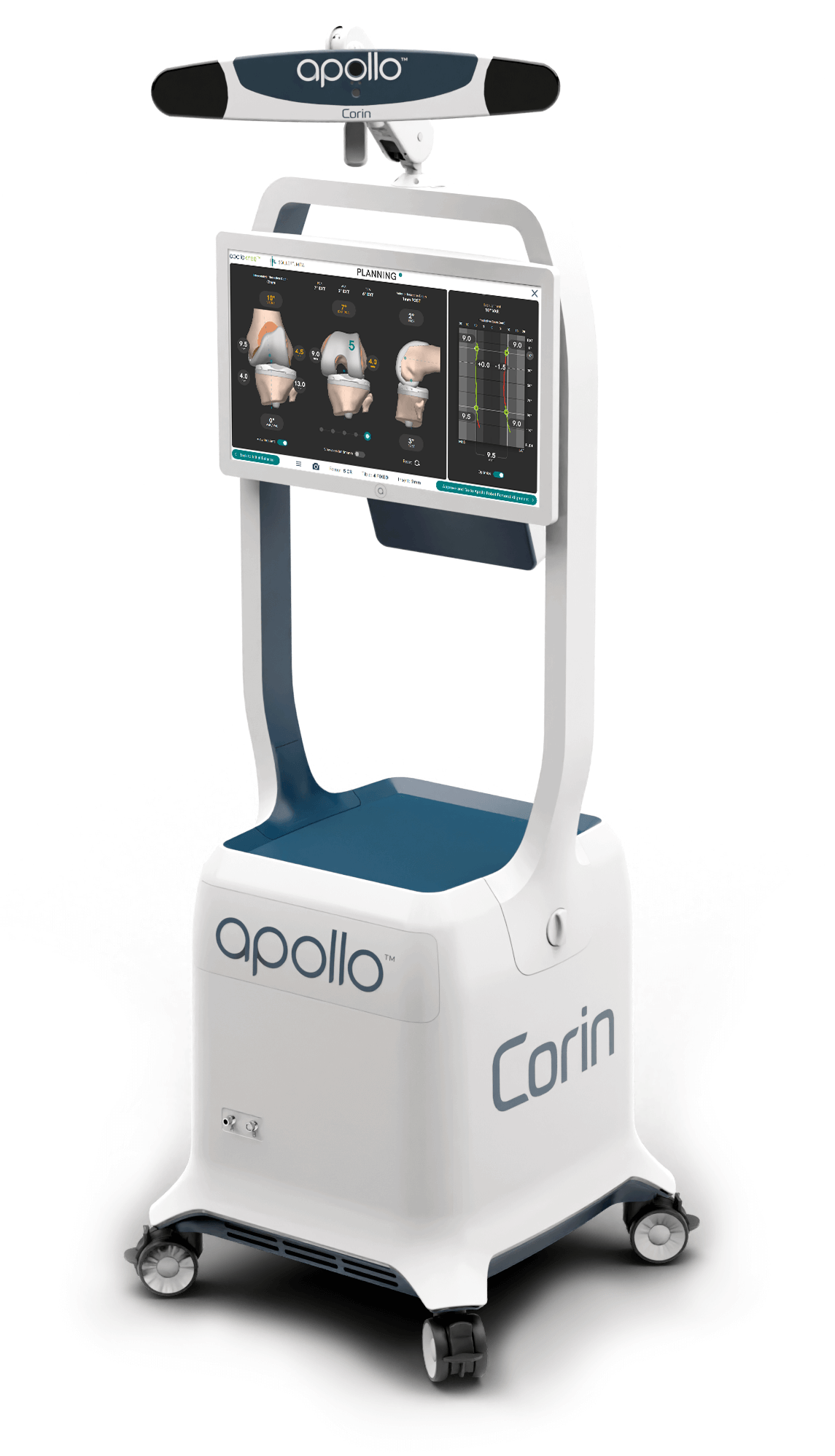
The Apollo™ system
- Includes the world’s only robotic ligament balancer that can assess balance throughout the full range of motion
- Helps surgeons achieve more consistent results with greater accuracy2
- Generates a personalised surgical plan for each patient
This knee balancing technology is designed to help the surgeon achieve balance throughout flexion, which has been shown to reduce post-operative pain3.
How does Apollo™ work?
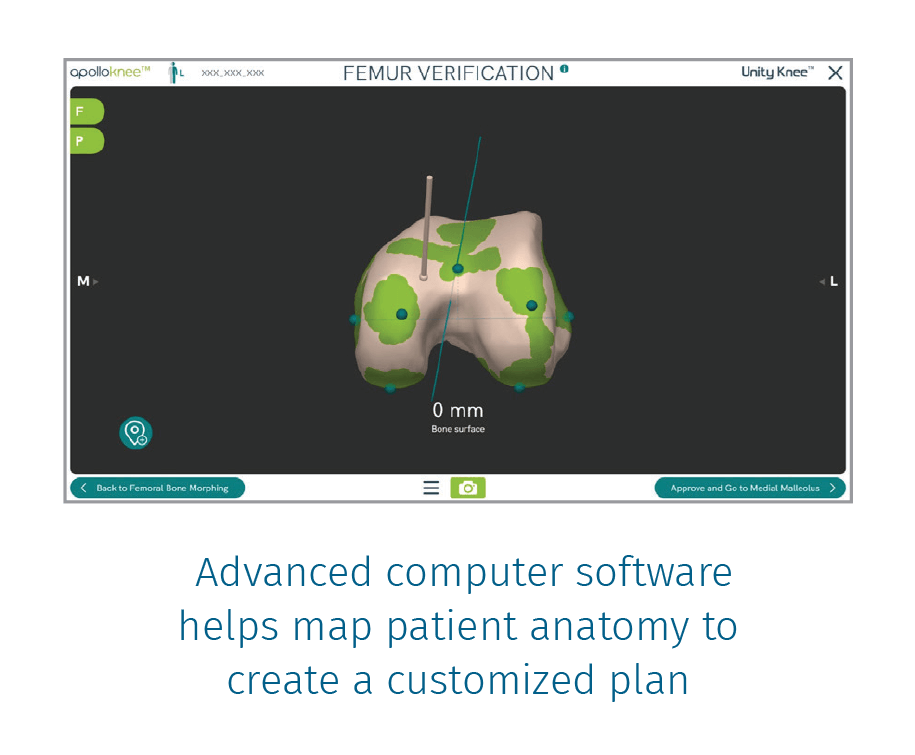
Your unique anatomy
At the start of the operation, the surgeon traces the surface of your knee with a pencil-like tool to produce a 3D model of your knee.
The surgeon will then robotically assess how tense or loose your knee is through the entire range of motion. This dynamic measurement allows the surgeon to assess your knee beyond what can be captured in a preoperative scan.
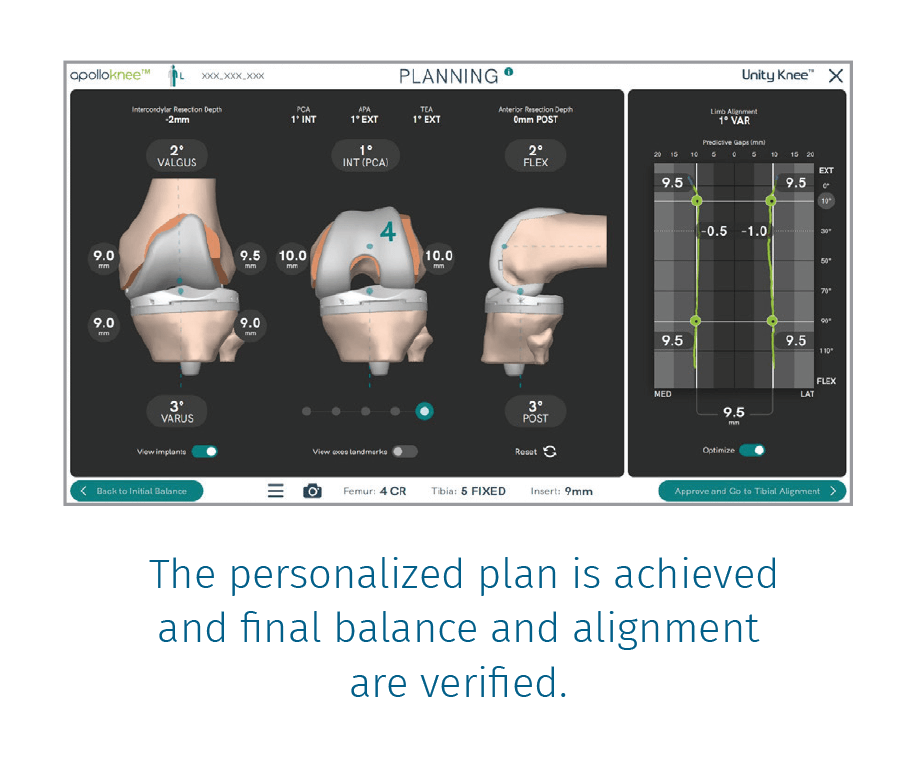
Patient-specific planning
Combining the 3D model with your range of motion data, the surgeon uses Apollo to adjust the planned placement of your total knee components. This results in a personalised surgical plan designed for your best fit, function, and stability.
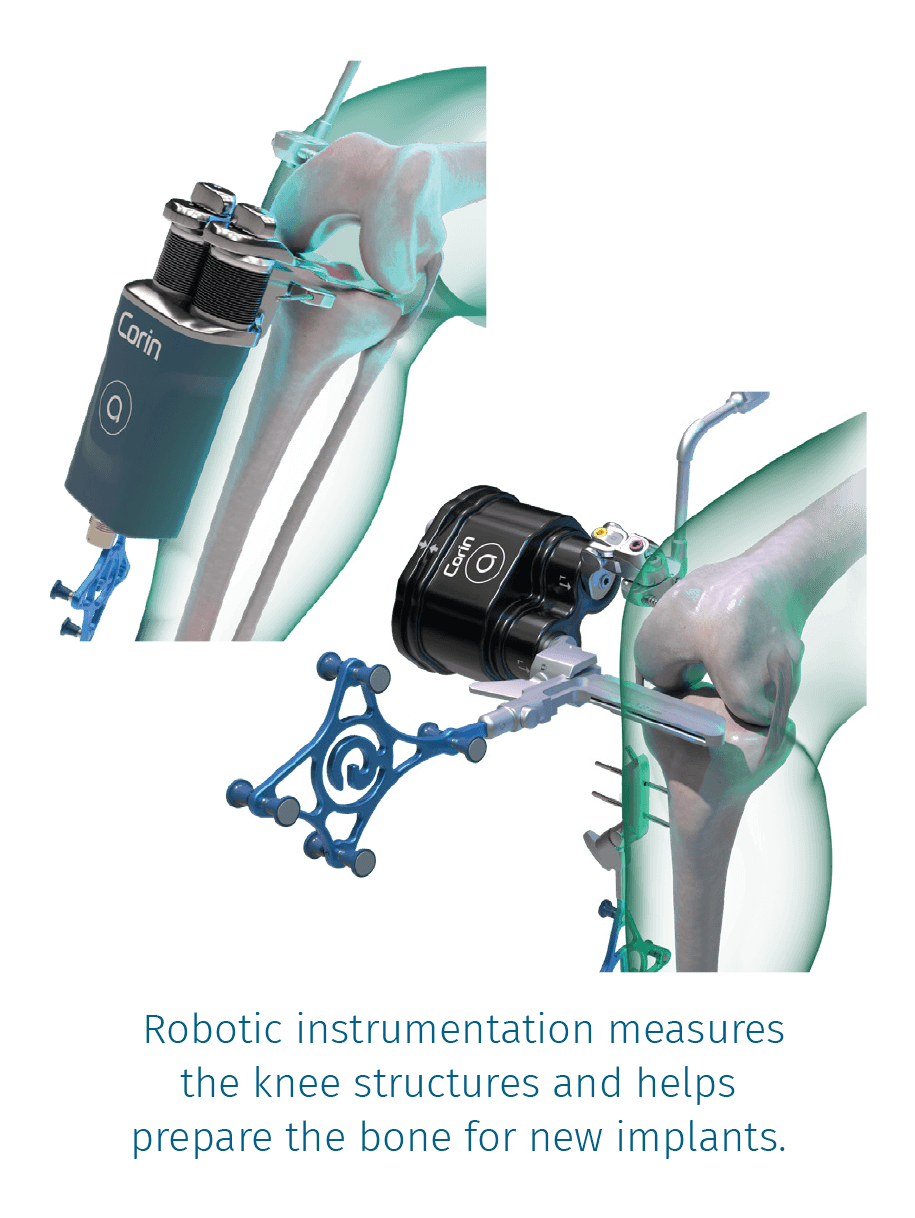
Robotic precision
With the plan in place, the surgeon can use the Apollo robotic cutting guide to assist with the removal of the arthritic knee surfaces.
The precision of this guide is important to ensure the implant plan is carried out within accuracy.
Once the damaged bone surface has been replaced with your total knee components the surgeon will take the knee through a final range of motion assessment to compare pre- and post-operative balance.
Find out more
Visit our Orthopaedic Surgery webpage for more information about knee replacement surgery at Nepean Private Hospital.
1. Keggi JM, Wakelin EA, Koenig JA, Lawrence JM, Randall AL, Ponder CE, DeClaire JH et al. “Impact of intra-operative predictive ligament balance on post-operative balance and patient outcome in TKA: a prospective multicenter study”. Arch Orthop Trauma Surg. 2021 Jul 13. doi: 10.1007/s00402-021-04043-3
2. Koulalis D, O’Loughlin PF, Plaskos C, Kendoff D, Pearle AD. “Adjustable cutting blocks for computer-navigated total knee arthroplasty a cadaver study”. J Arthroplasty. 2010 Aug;25(5):807-11.
3. Wakelin EA, Shalhoub S, Lawrence JM, Keggi JM, DeClaire JH, Randall AL, Ponder CE, Koenig JA, Lyman S, Plaskos C (2021) “Improved total knee arthroplasty pain outcome when joint gap targets are achieved throughout flexion”. Knee Surgery, Sports Traumatology, Arthroscopy:1-9
Corin provides products and services used by healthcare professionals. Corin is not a medical professional. Results are not necessarily typical and will vary due to health, weight, activity and other human variables. Not all patients are candidates for joint procedures. Only a medical professional can determine the treatment appropriate for your specific condition. Talk to your surgeon about whether joint replacement is right for you and the product and surgical procedure risks.